Принцип работы цифровой конструкции
Цифровыми устройствами используется специальный процессор, функционирующий на высоких частотах. Он обрабатывает сигнал приемника и посылает импульсы управления в двигатель с показателем частоты в 300 раз в секунду. Так как показатель частоты значительно выше, то и реакция заметно быстрее и держит позицию лучше. Это вызывает оптимальное центрирование и высокий уровень кручения. Но такой метод требует больших затрат энергии, поэтому батарея, используемая в аналоговом механизме, в этой конструкции будет разряжаться намного быстрее.
Однако все пользователи, которые хоть однажды столкнулись с цифровой моделью, говорят о том, что ее различие с аналоговой конструкцией настолько значительно, что они никогда бы больше не употребляли последнюю.
Серводвигатель дергается
Иногда при подключении сервы не отрабатывают заданные команды или отрабатывают некорректно. Причем происходить это может только при подключении к определенным USB портам. Причина в том, что сервы требуют достаточно большую мощность для питания, особенно в начале движения ротора. Эти резкие скачки потребляемой мощности могут сильно «просаживать» напряжение на Arduino. Может произойти даже перезагрузка платы.
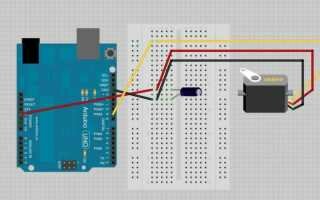
Если подобное происходит, вам надо добавить конденсатор (470 мкФ или больше) между рельсами GND и 5V на вашей макетке.
Конденсатор выполняет роль своебразного резервуара для электрического тока. Когда серводвигатель начинает работать, он получает остатки заряда с конденсатора и от источника питания Arduino одновременно.
Длинная нога конденсатора — это позитивный контакт, она подключается к 5V. Отрицательный контакт часто маркируется символом «-«.
Сервоприводы MG995 и MG996 tower pro
Серво MG995 является второй по популярности моделью сервоприводов, чаще всего подключаемых к проектам Arduino. Это относительно недорогие сервомоторы, обладающие гораздо лучшими характеристиками по сравнению с SG90.
Характеристики MG995
Выходной вал у MG995 поворачивается на 120 градусов (по 60 в каждом направлении), хотя многие продавцы указывают на 180 градусов. Устройство выполняется в пластиковом корпусе.
- Вес 55 г;
- Крутящий момент 8,5 кг х см;
- Скорость 0,2с/60 градусов (при 4,8В);
- Рабочее питание 4,8 – 7,2В;
- Рабочие температуры – от 0С до -55С.
Описание MG995
Подключение к ардуино также происходит по трем проводам. В принципе, для любительских проектов допускается подключение MG995 напрямую к Arduino, но ток двигателя всегда будет создавать опасную нагрузку для входов платы, поэтому рекомендуется все-таки запитывать серво отдельно, не забыв соединить землю обоих контуров питания. Другим упрощающим жизнь вариантом будет использование готовых сервоконтроллеров и шилдов, обзор которых мы подготовим в отдельной статье.
MG996R похож на MG995 по своим характеристикам, только он выполняется в металлическом корпусе.
Как работает сервопривод
Вращение выходного вала редуктора, связанного шестернями с сервоприводом, осуществляется путем запуска и остановки электродвигателя. Сам редуктор необходим для регулировки числа оборотов. Выходной вал может быть соединен с механизмами или устройствами, которыми необходимо управлять. Положение вала контролируется с помощью датчика обратной связи, способного преобразовывать угол поворота в электрические сигналы и на котором построен принцип работы всего устройства.
Этот датчик известен также, под названием энкодера или потенциометра. При повороте бегунка, его сопротивление будет изменяться. Изменения сопротивления находится в прямой пропорциональной зависимости с углом поворота энкодера. Данный принцип работы позволяет устанавливать и фиксировать механизмы в определенном положении.
Дополнительно каждый серводвигатель имеет электронную плату, обрабатывающую внешние сигналы, поступающие от потенциометра. Далее выполняется сравнение параметров, по результатам которого производится запуск или остановка электродвигателя. Следовательно, с помощью электронной платы поддерживается отрицательная обратная связь.
Подключить серводвигатель можно с помощью трех проводников. По двум из них подается питание к электродвигателю, а третий служит для прохождения сигналов управления, приводящих вал в определенное положение.
Предотвратить чрезмерные динамические нагрузки на электродвигатель возможно с помощью плавного разгона или такого же плавного торможения. Для этого применяются более сложные микроконтроллеры, обеспечивающие более точный контроль и управление позицией рабочего элемента. В качестве примера можно привести жесткий диск компьютера, в котором головки устанавливаются в нужную позицию с помощью точного привода.
Схема и типы сервоприводов
Принцип работы сервопривода основан на обратной связи с одним или несколькими системными сигналами. Выходной показатель подается на вход, где сравнивается его значение с задающим действием и выполняются необходимые действия – например, выключается двигатель. Самым простым вариантов реализации является переменный резистор, который управляется валом – при изменении параметров резистора меняются параметры питающего двигатель тока.
В реальных сервоприводов механизм управления гораздо сложнее и использует встроенные микросхемы-контроллеры. В зависимости от типа используемого механизма обратной связи выделяют аналоговые и цифровые сервоприводы. Первые используют что-то, похожее на потенциометр, вторые – контроллеры.
Вся схема управления серво находится внутри корпуса, управляющие сигналы и питание подаются, как правило, идут по трем проводам: земля, напряжение питания и управляющий сигнал.
Сервопривод непрерывного вращения 360, 180 и 270 градусов
Выделяют два основных вида серводвигателей – с непрерывным вращением и с фиксированным углом (чаще всего, 180 или 270 градусов). Отличие серво ограниченного вращения заключается в механических элементах конструкции, которые могут блокировать движение вала вне заданных параметрами углов. Достигнув угла 180, вал окажет воздействие на ограничитель, а тот отдаст команду на выключение мотора. У серводвигателей непрерывного вращения таких ограничителей нет.
Материалы шестерней сервопривода
У большинства сервоприводов связующим звеном между валом и внешними элементами является шестеренка, поэтому очень важно, из какого материала она сделана. Наиболее доступных вариантов два: металлические или пластмассовые шестерни
В более дорогих моделях можно найти элементы из карбона и даже титана.
Пластмассовые варианты, естественно, дешевле, проще в производстве и часто используются в недорогих моделях серво. Для учебных проектов, когда сервопривод делает несколько движений, это не страшно. Но в серьезных проектах использование пластмассы невозможно, в виду очень быстрого снашивания таких шестеренок под нагрузкой.
Металлические шестеренки надежнее, но это, безусловно, сказывается как на цене, так и на весе модели. Экономные производители могут сделать часть деталей пластмассовыми, а часть металлическими, это тожно нужно иметь в виду. Ну и, естественно, что в самых дешевых моделях даже наличие металлической шестеренки не является гарантией качества.
Титановые или карбоновые шестерни – самый предпочтительный вариант, если вы не ограничены бюджетом. Легкие и надежные, такие сервоприводы активно используются для создания моделей автомобилей, дронов и самолетов.
Преимущества серводвигателей
Широкое использование сервоприводов связано с тем, что они обладают стабильной работой, высокой устойчивостью к помехам, малыми габаритами и широким диапазоном контроля скорости. Важными особенностями сервоприводов являются способность увеличивать мощность и обеспечение обратной информационной связи. И этого следует, что при прямом направлении контур является передатчиком энергии, а при обратном – передатчиком информации, которая используется для улучшения точности управления.
Отличия серво и обычного двигателя
Включая или выключая обычный электрический двигатель, мы можем сформировать вращательное движение и заставить двигаться колеса или другие предметы, прикрепленные к валу. Движение это будет непрерывным, но для того, чтобы понять, на какой угол повернулся вал или сколько оборотов он сделал, потребуется устанавливать дополнительные внешние элементы: энкодеры. Сервопривод уже содержит все необходимое для получения информации о текущих параметрах вращения и мжет самостоятельно выключаться, когда вал повернется на необходимый угол.
Отличия серво и шагового мотора
Важным отличием серводвигателя от шагового двигателя является возможность работать с большими ускорениями и при переменной нагрузке. Также серводвигатели обладают более высокой мощностью. Шаговые двигатели не обладают обратной связью, поэтому может наблюдаться эффект потери шагов, в серводвигателях потери шагов исключены – все нарушения будут зафиксированы и исправлены. При всех этих явных преимуществах серводвигатели являются более дорогостоящими приборами, чем шаговые двигатели, обладают более сложной системой подключения и управления и требуют более квалифицированного обслуживания
Важно отметить, что шаговые двигатели и сервоприводами не являются прямыми конкурентами – каждое из этих устройств занимает свою определенную сферу применения
Подключение серводвигателя к ардуино
Сервопривод обладает тремя контактами, которые окрашены в разные цвета. Коричневый провод ведет к земле, красный – к питанию +5В, провод оранжевого или желтого цвета – сигнальный. К Ардуино устройство подключается через макетную указанным на рисунке образом. Оранжевый провод (сигнальный) подключается к цифровому пину, черный и красный – к земле и питанию соответственно. Для управления серводигателем не требуется подключение именно к шим-пинам – принцип управления серво мы уже описывали ранее.
Не рекомендуется подключать мощные серво напрямую к плате , т.к. они создают для схемы питания Arduino ток, не совместимый с жизнью – повезет, если сработает защита. Чаще всего симптомы перегрузки и неправильного питания сервопривода заключаются в “дергании” серво, неприятному звуку и перезагрузке платы. Для питания лучше использовать внешние источники, обязательно объединяя земли двух контуров.
Переделка сервопривода в серво непрерывного вращения
Как описывалось выше, сервопривод управляется импульсами переменной ширины, которые задают угол поворота. Текущее положение считывается с потенциометра. Если рассоединить вал и потенциометр, серводвигатель будет принимать положение движка потенциометра как в средней точке. Все эти действия приведут к тому, что будет убрана обратная связь. Это позволяет управлять скоростью и направлением вращения по сигнальному проводу, и создать серво непрерывного вращения
При этом важно отметить, что серво постоянного вращения не может поворачиваться на определенный угол и делать строго заданное количество оборотов
Чтобы произвести вышеописанные действия, придется разобрать устройство и внести изменения в конструкцию.
В Ардуино IDE нужно создать небольшой скетч, который поставит качалку в среднее положение.
#include
Servo myservo;
void setup(){
myservo.attach(9);
myservo.write(90);
}
void loop(){
}
После этого устройство нужно подключить к Ардуино. При подключении серво начнет вращаться. Нужно добиться ее полной остановки путем регулирования резистора. После того, как вращение прекратится, нужно найти вал, вытащить из него гибкий элемент и установить обратно.
Этот метод имеет несколько недостатков – настройка резистора до полной остановки неустойчива, при малейшем ударе/нагреве/охлаждении настроенная нулевая точка может сбиться. Поэтому лучше использовать способ замены потенциометра подстроечником. Для этого нужно вытащить потенциометр и заменить его на подстроечный резистор с таким же сопротивлением. Нулевую точку нужно настроить калибровочным скетчем.
Любой из методов переделки сервопривода в серво непрерывного вращения имеет свои недостатки. Во-первых, сложно настроить нулевую точку, любое движение может ее сбить. Во-вторых, диапазон регулирования мал – при небольшом изменении ширины импульса скорость может значительно измениться. Расширить диапазон можно программно в Ардуино.
Устройство сервопривода
Основные детали, из которых состоит типовой серводвигатель – ротор и статор. Для коммутации применяются специальные комплектующие в виде штекеров и клеммных коробок. Управление, контроль и коррекция процессов осуществляется с помощью отдельного управляющего узла. Для включения и выключения сервопривода используется отдельная система. Все детали, помещаются в общем корпусе.
Практически во всех сервоприводах имеется датчик, работающий и отслеживающий определенные параметры, такие как положение, усилие или скорость вращения. С помощью управляющего блока поддерживается автоматический режим необходимых параметров при работе устройства. Выбор того или иного параметра происходит в зависимости от сигналов, поступающих от датчика в установленные промежутки времени.
Разница между сервоприводом и обычным электродвигателем заключается в возможности установки вала в точно заданное положение, измеряемое в градусах. Установленное положение, так же, как и другие параметры, поддерживаются блоком управления.
Их принцип работы заключается в преобразовании электрической энергии в механическую, с помощью электродвигателя. В качестве привода используется редуктор, позволяющий снизить скорость вращения до требуемого значения. В состав данного устройства входят валы с шестернями, преобразующими и передающими крутящий момент.
Характеристики сервоприводов
Устройства выпускаются аналогового и цифрового типов. Приводы внешне ничем не отличаются, но различие между ними существенное. Последние обладают более точной отработкой команд, поскольку управление производится микропроцессорами. Для сервоприводов пишутся и вводятся программы. Аналоговые устройства работают от сигналов микросхем. Их преимуществами являются простое устройство и меньшая цена.
Основными параметрами для выбора являются следующие:
- Питание. Подача напряжения производится по трем проводам. По белому передают импульс, через красный — рабочее напряжение, черный или коричневый является нейтральным.
- Размеры: большие, стандартные и микроустройства.
- Скорость. От нее зависит, за какой промежуток времени вал повернется на угол 60. Недорогие устройства обладают скоростью 0,22 сек. Если требуется высокое быстродействие, она составит 0,06 сек.
- Величина момента. Параметр является приоритетным, поскольку при малом вращающем моменте управление затрудняется.
Назначение и устройство
Широкое применение сервопривод нашел в робототехнике, машиностроении, автомобилестроении, автоматизации процессов в производстве. С его помощью приводятся в действие манипуляторы, выполняется открытие (полное или неполное) или закрытие (прикрытие) заслонок, в станкостроении для подачи режущего инструмента и других исполнительных механизмов.
Представляет собой устройство, состоящее их электродвигателя, редуктора, датчика положения (энкодера) или резистора и контроллера (устройства управления).
Простыми словами — это электромеханический привод, который через внутреннюю обратную связь, устанавливает точное положение вала механизма в зависимости от внешних управляющих сигналов.
На рисунке представлен разрез устройства:
Сервоприводы выпускаются различной мощности и назначения: небольшой мощности от 0,05 кВт, применяемые в автомобилестроении и робототехнике, например, sg90 и значительной мощности в 15 кВт. Последние монтируются в промышленных манипуляторах, станках с ЧПУ, для управления задвижками в нефтегазовой промышленности и т.д.
Не всегда в качестве мотора на сервопривод монтируется электродвигатель. В качестве привода может использоваться цилиндр со штоком, приводящийся в движение сжатым воздухом или жидкостью.
Выбор языка сайта
Afrikaans Albanian Amharic Arabic Armenian Azerbaijani Basque Belarusian Bengali Bosnian Bulgarian Catalan Cebuano Chichewa Chinese (Simplified) Chinese (Traditional) Corsican Croatian Czech Danish Dutch English Esperanto Estonian Filipino Finnish French Frisian Galician Georgian German Greek Gujarati Haitian Creole Hausa Hawaiian Hebrew Hindi Hmong Hungarian Icelandic Igbo Indonesian Irish Italian Japanese Javanese Kannada Kazakh Khmer Korean Kurdish (Kurmanji) Kyrgyz Lao Latin Latvian Lithuanian Luxembourgish Macedonian Malagasy Malay Malayalam Maltese Maori Marathi Mongolian Myanmar (Burmese) Nepali Norwegian Pashto Persian Polish Portuguese Punjabi Romanian Russian Samoan Scottish Gaelic Serbian Sesotho Shona Sindhi Sinhala Slovak Slovenian Somali Spanish Sudanese Swahili Swedish Tajik Tamil Thai Turkish Ukrainian Urdu Uzbek Vietnamese Welsh Xhosa Yiddish
Виды и характеристики
Серводвигатели выпускаются в самых разных вариантах, позволяющих использовать их во многих областях. Основные конструкции разделяются на коллекторные и бесколлекторные, предназначенные для работы от постоянного и переменного тока.
Кроме того, каждый сервомотор может быть синхронным и асинхронным. Синхронные устройства обладают способностью задавать высокоточную скорость вращения, а также углы поворотов и ускорение. Эти приводы очень быстро набирают номинальную скорость вращения. Сервоприводы в асинхронном исполнении управляются за счет изменения параметров питающего тока, когда его частота меняется с помощью инвертора. Они с высокой точностью выдерживают заданную скорость даже при самых низких оборотах.
В зависимости от принципиальной схемы и конструкции, сервоприводы могут быть электромеханическими и электрогидромеханическими. Первый вариант, включающий редуктор и двигатель, отличается низким быстродействием. Во втором случае действие происходит очень быстро за счет движения поршня в цилиндре.
Каждый сервопривод характеризуется определенными параметрами:
- Крутящий момент или усилие, создаваемое на валу. Считается наиболее важным показателем работы сервопривода. Для каждой величины напряжения существует собственный крутящий момент, отражаемый в паспорте изделия.
- Скорость поворота. Данный параметр представляет собой определенный период времени, который требуется, чтобы изменить позицию выходного вала на 600. Эта характеристика также зависит от конкретного значения напряжения.
- Максимальный угол поворота, на который может развернуться выходной вал. Чаще всего эта величина составляет 180 или 3600.
- Все сервоприводы разделяются на цифровые и аналоговые. В зависимости от этого и осуществляется управление сервоприводом.
- Питание серводвигателей. В большинстве моделей используется напряжение от 4,8 до 7,2В. Питание и управление осуществляется с помощью трех проводников.
- Возможность модернизации в сервопривод постоянного вращения.
- Материалы для редуктора могут использоваться самые разные. Шестерни изготавливаются из металла, карбона, пластика или комбинированных составов. Каждый из них обладает своими преимуществами и недостатками. Например, пластиковые детали плохо выдерживают ударные нагрузки, но устойчивы к износу в процессе длительной эксплуатации. Металлические шестерни, наоборот, быстро изнашиваются, зато они обладают высокой устойчивостью к динамическим нагрузкам.
Скетч для управления сервоприводом в Arduino
Управление сервоприводом напрямую через изменение в скетче длительности импульсов – достаточно нетривиальная задача, но у нас, к счастью, есть отличная библиотека Servo, встроенная в среду разработки Arduino. Все нюансы программирования и работы с сервоприводами мы рассмотрим в отдельной статье. Здесь же приведем простейший пример использования Servo.
Алгоритм работы прост:
- Для начала мы подключаем Servo.h
- Создаем объект класса Servo
- В блоке setup указываем, к какому пину подключен серво
- Используем методы объекта обычным для C++ способом. Самым популярным является метод write, которому мы подаем целочисленное значение в градусах (для сервопривода 360 эти значения будут интерпретироваться по-другому).
Пример простого скетча для работы с сервоприводом
Пример проекта, в котором мы сразу сначала устанавливаем серводвигатель на нулевой угол, а затем поворачиваем на 90 градусов.
#include
Servo servo; // Создаем объект
void setup() {
servo.attach(9); // Указываем объекту класса Servo, что серво присоединен к пину 9
servo1.write(0); // Выставляем начальное положение
}
void loop() {
servo.write(90); // Поворачиваем серво на 90 градусов
delay(1000);
servo.write(1800);
delay(100);
servo.write(90);
delay(1000);
servo.write(0);
delay(1000);
}
Скетч для двух сервпоприводов
А в этом примере мы работаем сразу с двумя сервоприводами:
#include
Servo servo1; // Первый сервопривод
Servo servo2; // Второй сервопривод
void setup() {
servo1.attach(9); // Указваем объекту класса Servo, что серво присоединен к пину 9
servo2.attach(10); // А этот servo присоединен к 10 пину
}
void loop() {
// Выставялем положения
servo1.write(0);
servo2.write(180);
delay(20);
// Меняем положения
servo2.write(0);
servo1.write(180);
}
Управление сервоприводом с помощью потенциометра
В этом примере поворачиваем серво в зависимости от значения, полученное от потенциометра. Считываем значение и преобразовываем его в угол с помощи функции map:
//Фрагмент стандартного примера использования библиотеки Servo
void loop() {
val = analogRead(A0); // Считываем значение с пина, к которому подключен потенциометр
val = map(val, 0, 1023, 0, 180); // Преобразуем число в диапазоне от 0 до 1023 в новый диапазон - от 0 до 180.
servo.write(val);
delay(15);
}
Принцип работы
программа управления серводвигателями Mach3
Основным аспектом функционирования серводвигателей является условия его работы в рамках системы G-кодов, то есть команд управления, содержащихся в специальной программе. Если рассматривать данный вопрос на примере ЧПУ, то сервомоторы функционируют во взаимодействии с преобразователями, которые изменяют величину напряжения на якоре или на возбуждающей обмотке двигателя, исходя из уровня входного напряжения. Обычно управление всей системой производится с помощью стойки ЧПУ. При получении команды из стойки пройти определенное расстояние вдоль координатной оси Х, в субблоке цифрового аналогового преобразователя стойки создается напряжение некоторой величины, которое передается для питания привода указанной координаты. В сервомоторе начинается вращение ходового винта, с которым связан энкодер и исполнительный орган станка. В первом происходит выработка импульсов, подсчитываемых стойкой. Программа предусматривает, что некоторое количество сигналов с энкодера соответствует определенному расстоянию прохождения исполняющего механизма. При получении нужного количества импульсов аналоговый преобразователь выдает нулевое значение выходного напряжения, и сервомотор останавливается. В случае смещения под внешним воздействием рабочих элементов станка на энкодере формируется импульс, обсчитываемый стойкой, на привод подается напряжение рассогласования, и якорь двигателя поворачивается до получения нулевого значения рассогласования. В результате обеспечивается точное удержание рабочего элемента станка в заданном положении.
Сервоприводные модели для полиграфических станков
Для полиграфических станков модели необходимы с синхронными типами моторов. Мощность их обязана достигать 2 кВт. Параметр предельной частоты приветствуется на уровне 30 Гц. На сегодняшний день большинство производителей выпускают сервоприводы с аналоговыми потенциометрами. Также следует отметить, что редукторные коробки, как правило, используются плоские. Все это необходимо для того, чтобы устройство было компактным.
Отдельного внимания в сервоприводах данного типа заслуживают роторы. Показатель проводимости у них обязан минимум составлять 3 мк. Все это необходимо для хорошего ускорения. Выходные валы в данном случае используются небольшого диаметра. Конвертеры чаще всего можно встретить на три контакта. Для блоков питания на 20 В они подходят идеально. Статорные коробки устанавливаются различной формы и по конструкции могут сильно различаться. В этой ситуации многое зависит от энкодера, который установлен в сервоприводе.
Шаговый двигатель
Шаговый двигатель – это бесщеточный электромотор, работающий в паре плата-драйвер. Как правило, шаговые двигатели имеют несколько фаз (обмоток), поочередно включаемых драйвером. Двигатель поворачивается за счет подачи короткого импульса на одну из обмоток статора, в результате чего в движение приводится магнитный ротор.
Обычно шаговые двигатели маломощны и не предназначены для больших скоростей и непрерывного вращения.
Величина физического шага двигателя может варьироваться в зависимости от конструкционных особенностей ротора: от 90 до 0.9 градусов. Шаг можно дробить при помощи программных ухищрений, снижая при этом шум от работы драйверов и увеличивая точность, благодаря повышенному числу шагов на оборот. Точность может составлять до 20 микрон.
Несмотря на высокоточность шагового двигателя, у него имеется существенный минус: пропуск шагов при повышенных нагрузках, поскольку двигатель не имеет обратной связи контроллером, а последний не умеет отслеживать работу шагового двигателя без углового датчика.
Недостатки шаговых двигателей:
- пропуски шагов при высоких ускорениях и больших нагрузках;
- низкая цена;
- неремонтопригодность.
Существуют шаговые двигатели с энкодером, ничем не отличающиеся от обычных, кроме дополнительных выводов с угловым датчиком. Это решает проблему с пропусками, но добавляет немало к стоимости. Плюс для их использования нужно иметь специальный контроллер, имеющий функцию коррекции ошибки шаговика.
Несмотря на недостатки, шаговые двигатели широко используются как в крупных отраслях промышленности, так и для бытовых нужд:
- в тяжелых и высокоточных станках (в металлообработке, лазерной резке);
- в легких ЧПУ (домашние 3D-принтеры, гравировальные машины);
- в робототехнике (роботы со сложной кинематикой);
- в игрушках (машины, самолеты).
Сервопривод и шаговый двигатель не являются между собой конкурентами. Под каждую задачу необходимо выбрать свой тип мотора.
Общие принципы работы серводвигателей (сервомоторов)
Серводвигатели включают в свой состав небольшой двигатель постоянного тока, редуктор и схему управления, содержащую переменный резистор, дающий возможность установить выходной вал серводвигателя под определенным углом. Поэтому серводвигатели очень удобны для проектов, где требуется осуществлять весьма быстрое и относительно точное перемещение какого-либо рабочего органа.
Типы серводвигателей
Серводвигатели часто используются в радиоуправляемых моделях автомобилей для поворота рулевых колес или в моделях радиоуправляемых самолетов – для поворота управляющих поверхностей (рулей). На следующем рисунке показаны два серводвигателя разных размеров.
Серводвигатель справа представляет собой так называемый стандартный серводвигатель. Это наиболее распространенный тип серводвигателя. Такие серводвигатели достаточно часто имеют одинаковые размеры и монтажные расстояния между отверстиями. Намного меньший (и более легкий) серводвигатель слева предназначен для летательных аппаратов. Эти серводвигатели называются сервоприводами 9g .
Сервоприводы с более высоким качеством исполнения и более высоким крутящим моментом имеют редуктор с шестернями из металла, а не из нейлона. Большинство серводвигателей работают на номинальном напряжении питания около 5 В при допустимом диапазоне питающих напряжений от 4 до 7 В. Подключение любительских сервоприводов обычно осуществляется через провода, заканчивающиеся 3-контактным разъемом: питание +, питание — и управляющий сигнал.
Большие и иногда весьма мощные серводвигатели также доступны для использования, но они не так стандартизированы, как любительские маломощные сервомашинки.
Устройство сервопривода
Сервопривод (см. рисунок) состоит из электродвигателя, постоянного тока, приводящего в действие редуктор, уменьшающий скорость вращения двигателя и, в то же время увеличивающий крутящий момент на валу. Для контроля положения выходного вала он соединен с датчиком положения (как правило, это переменный резистор). Для управления мощностью и направлением, в котором поворачивается двигатель сервопривода, схема управления использует входной сигнал от датчика положения в сочетании с сигналом управления, задающим требуемое положение.
Блок управления, получив через сигнал управления величину желаемого положения вала, вычитает из него величину действительного его положения и вырабатывает «сигнал ошибки», который может быть положительным или отрицательным. Этот «сигнал ошибки» подается на питание двигателя, заставляя его изменить положение вала в нужном направлении. Чем больше разница между желаемым и действительным положением выходного вала, тем быстрее двигатель будет поворачиваться к желаемой позиции. Чем ближе к нулю становится значение ошибки (рассогласования), тем меньше становится питание двигателя.
Управление серводвигателем
Управляющий сигнал на серводвигатель — это не напряжение, как можно было бы ожидать, а сигнал широтно-импульсной модуляции (ШИМ). Этот сигнал является стандартным для всех любительских сервомашинок и выглядит так, как показано на следующем рисунке.
Серводвигатель ожидает прихода импульса управления каждые 20 мс. Импульс длительностью 1,5 мс установит серводвигатель в центральное положение, соответствующее повороту выходного вала на 90°. Более короткие импульсы в 1,0 мс установят выходной вал в начальное положение — 0°, а импульсы в 2,0 мс — крайнее положение — 180°. В реальности этот диапазон может быть немного меньше, чем полные 180°, без укорочения импульсов на одном конце и удлинения на другом. Не редкость и ситуация, когда для 0° нужен импульс 0,5 мс, а для 180° — 2,5 мс.
Назначение контактов сервомотора
Представлено на следующем рисунке. Я думаю, здесь все просто и понятно.
1. Red (красный) = Положительное напряжение питания (от 4.8V до 6V)2. Brown (коричневый) = Ground (земля)3. Orange (оранжевый) = Control Signal – управляющий сигнал (PWM Pin – контакт ШИМ)
Заключение
Сервоприводы играют очень важную роль для многих проектов Ардуино, от робототехнических до систем умного дома. Все, что связано с движением, традиционно требует особых знаний и создать полноценный правильно работающий привод – непростая задача. Но с помощью серводвигателей можно во многих случаях упростить задачу, поэтому серво постоянно используется даже в проектах начального уровня.
В этой статье мы постарались раскрыть разные аспекты использования сервоприводов в проектах arduino: от подключения до написания скетчей. Выбрав самую простую модель серво (например, sg 90) вы сможете без труда повторить приведенные примеры и создать свои первые проекты, в которых что-то движется и изменяется. Надеемся, эта статья поможет вам в этом.